|
生物组织的复杂层次结构赋予了它们独特的性能。例如,丝绸、珍珠母、骨骼和牙齿等天然结构材料具有硬质相和软质相依次排列的层次结构,因而它们能表现出独特的力学性能。除了静态特性,生物材料还可对外界环境产生高精度动态响应,而哺乳动物的骨骼肌就是一个很好的例子。骨骼肌在单细胞(肌肉纤维)水平上具有高度有序的条纹特征(图 1a)。肌肉的驱动性能与它们的结构顺序直接相关,内部结构的紊乱会导致功能的严重丧失。
受天然肌肉的启发,人造肌肉和仿生驱动器在近年迅速发展,并有望彻底改变机器人、、假肢和智能服装领域。人造肌肉发展的一个重要方向是将高性能驱动材料与基于天然骨骼肌纤维的结构设计相结合。纳米级嵌段共聚物自组装是一种理想的工具,因为它具有广泛的结构模板和完善的指导理论。随着合成策略和链结构多功能性的发展,纳米级自组装嵌段共聚物被广泛应用于粘合剂、涂料和包装等日常商品,以及高度工程化的产品,例如治疗给药、有机电子和分离膜。
鉴于此,华南理工大学郎超教授联合宾夕法尼亚州立大学Robert J. Hickey教授提出了一种开发纳米结构驱动材料的创新策略。该策略基于哺乳动物骨骼肌纤维的构效关系,采用纳米结构的嵌段共聚物,实现了可逆和可回收的聚合物致动器。将溶液相嵌段共聚物自组装和随后的应变程序化结晶(strain-programmed crystallization,SPC)相结合,制造出了一类新的高性能柔性致动器/人造肌肉纤维。该纤维具有卓越的驱动效率(75.5 %)、驱动应变(80%)和力学性能(高达900%的断裂应变和高达121.2 MJ m-3的断裂韧性)。该材料有望应用于手术机器人、智能服装、触觉界面以及假肢等领域。该研究以题为“Nanostructured block copolymer muscles”的论文发表在最新一期《Nature nanotechnology》上。
【纳米结构嵌段共聚物的制备】
作者采用简单的两步法来制造该仿生驱动纤维。第一步是通过快速注射法,将聚(苯乙烯)-b-聚(环氧乙烷)-b-聚(苯乙烯)(SOS)的四氢呋喃 (THF) 溶液注入水浴中触发自组装(图1a,b),制备出均匀的水凝胶纤维。线性ABA型三嵌段共聚物SOS通过连续活性阴离子聚合和偶联步骤合成,得到低分子量分散性的共聚物,以增强对自组装过程的控制,有助于模仿肌肉纤维的长程有序结构。扫描电子显微镜(SEM)图像表明,在微米尺度上,冷冻干燥的水凝胶纤维的聚合物形成了一个相互连接的细胞网络,这是由于快速注射诱导的相分离而形成的(图 1c)。小角度X射线散射(SAXS)结果表明,在纳米尺度上,制备的水凝胶具有由疏水聚(苯乙烯)块聚集形成的球形胶束结构(图 1d)。
制备的第二步是沿纤维轴方向拉伸弹性水凝胶纤维,并在干燥过程中诱导O-block结晶,以实现低熵、取向的聚合物链状态。在外界特定刺激下,O-block晶体会经历熔化转变成为非晶态,释放储存的机械能,产生驱动行为。制备取向纤维的两步法过程没有在原始ABA三嵌段共聚物中引入任何新的化学交联或其他成分,因此将该自组装材料重新溶解在合适的溶剂中,即可进行回收和再利用。
图1. 通过由自组装ABA三嵌段共聚物制成的水凝胶的SPC来制备纤维。
【人造肌肉纤维的结构】
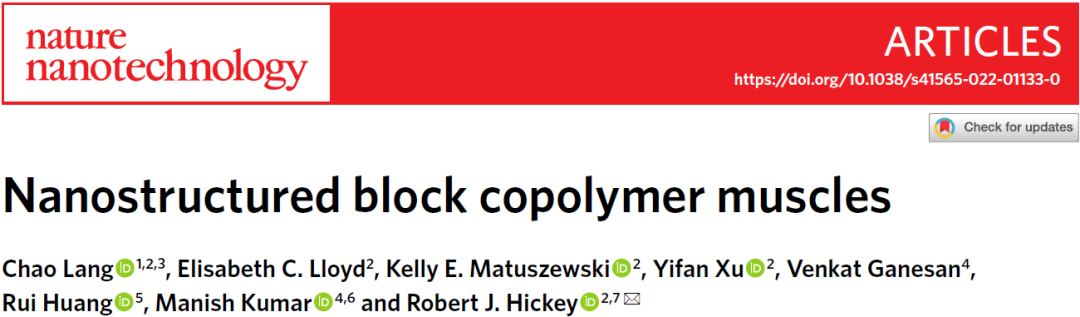
作者用广角X射线散射(WAXS) 和小角X射线散射(SAXS)表征了人造肌肉纤维的晶胞和层状取向,并通过差示扫描量热法(DSC)证实了纤维中结晶域的存在。二维(2D)WAXS 图案显示不同样品中O-block晶体结构相同(图2a-d),而晶畴的取向随着拉伸率的增加而增加。拉伸后纤维的SEM图像进一步验证了纤维的结构,S球与O晶体的排列结构形成了纳米粒子嵌入半结晶聚合物基质中的复合材料,这与骨骼肌纤维的条纹外观十分相似。肌纤维的条纹图案是肌原纤维横向排列的结果,其中可以观察到高度有序交替的暗(各向异性,A)带和亮(各向同性,I)带。I带的相邻中心之间的重复单元被定义为肌节,当肌肉纤维收缩或拉伸时,其长度将相应变化。类似地,在应变处理后的SOS纤维中,结晶域在温和的加热条件下熔化,这将导致相邻的非晶域相互接近并产生收缩力(图 1a)。
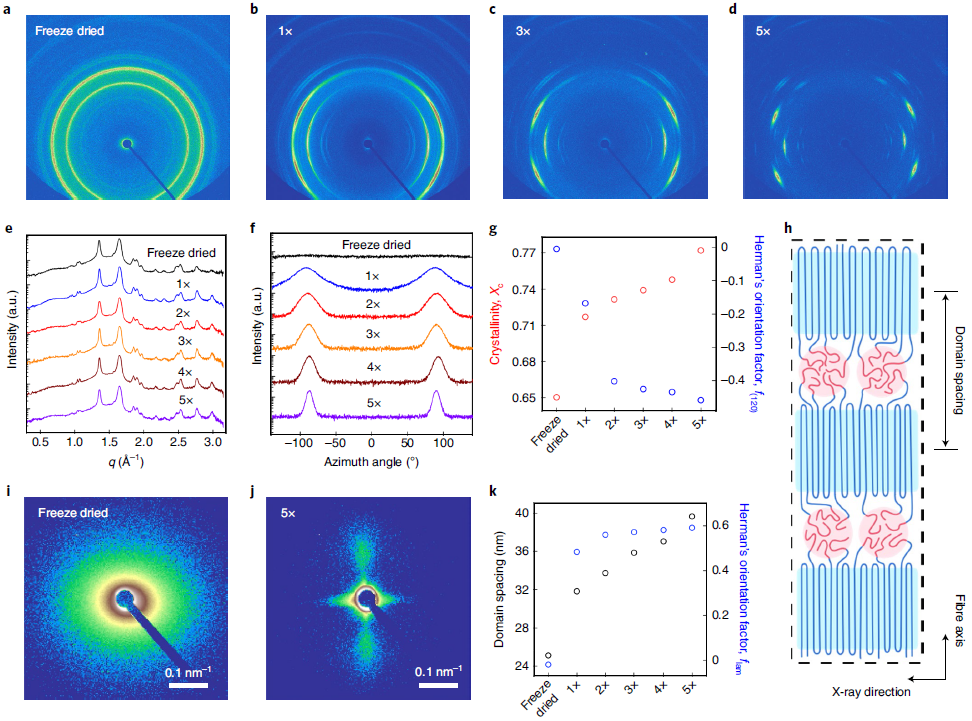
图2. 应变处理后纤维的SAXS和WAXS表征结果:该结构高度排列,由交替的结晶域和无定形域组成。
【人造肌肉纤维的力学性能和驱动特性】
该纤维具有卓越的力学性能,其断裂应变高达900%,断裂韧性高达121.2 MJ m-3(图3 a-b)。其驱动性能也十分优异,其中驱动效率可达75.5 %、驱动应变可达80%(图3 c-e)。
最后,作者通过在固定纤维长度(即恒定应变)下加热部分熔化结晶域来表征纤维的可逆驱动行为。通过控制加热温度和时间,5×(拉伸5倍)纤维能产生可逆的收缩应力,并且在超过100个驱动循环中,其性能没有任何损失(图 4a)。除了收缩之外,该纤维还能以循环方式进行膨胀驱动。当环境中的相对湿度发生变化时,纤维的无定形区域能可逆地吸收和释放水分,引起纤维产生可逆的膨胀应力(图 4b)。当两种刺激一起施加时,纤维可以根据需要产生收缩或扩张应力(图 4c),使它们比天然肌肉纤维更具通用性(图 4d)。这种双重驱动功能对于构建在复杂环境中工作的多模式机器人十分有前景。
除线性致动器外,作者还通过在结晶前扭转水凝胶纤维,制备了旋转致动器。SEM图像显示螺旋纤维的旋转角度可以通过控制扭转度来调整(图 4e)。与线性致动器类似,旋转致动可通过水合或加热触发的(图 4f),并能以连续和可切换模式运行。在水合作用下,致动器能以连续的方式工作,其最高转速为450 r.p.m。
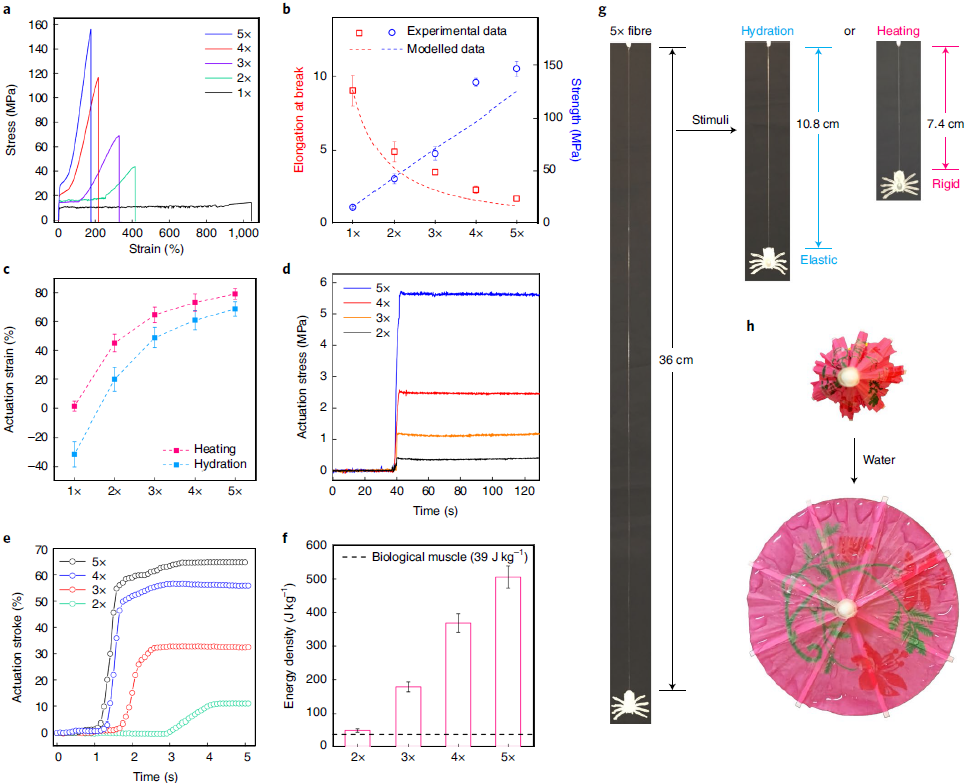
图3. 应变后的纤维表现出卓越的机械和驱动性能。
图4. 应变后的纤维的可逆和旋转驱动特性。
【小结】
该项工作提出了一种开发纳米结构驱动材料的创新策略。该策略基于哺乳动物骨骼肌纤维的构效关系,采用纳米结构的嵌段共聚物,实现了可逆和可回收的聚合物致动器。将溶液相嵌段共聚物自组装和随后的应变程序化结晶相结合,制造出了一类新的高性能柔性致动器/人造肌肉纤维。该纤维具有卓越的驱动效率、驱动应变和力学性能。这些优异性能归因于高度取向的纳米级纤维微观结构,其中包含交替的结晶域和非晶域。通过植入具有不同刺激响应的线性和旋转驱动运动,该材料可实现连续和可切换的操作模式。该材料有望应用于手术机器人、智能服装、触觉界面以及假肢等领域。
高分子科学前沿

|



