|
气动执行器因其弯曲程度高、自由度大、环境适应性强等特点,在医疗保健、复杂地形勘探等领域有广泛的应用前景。但由于其压力系统离不开笨重且刚性的泵驱动气体设备,极大地限制了执行器的尺寸和移动性,以及在室外环境中的应用。液-气相变复合材料是一种在柔性弹性体中掺杂液-气相变材料而形成的智能材料。当温度达到材料沸点时,液滴蒸发产生压力,带动复合材料膨胀,因此每个微液滴都可以看作是一个气动单元。通过这种方式,将气源和气泵的功能集成到主要材料中,大大降低了系统的复杂性。然而,相变执行器的加热方式受到焦耳加热或环境加热的限制,需要外接电源或更高的环境温度,这阻碍了其更广泛的应用。此外,目前对执行器变形行为的监测通常由光学相机记录,然后对获得的图像进行后分析,缺乏实时性。因此,如何设计一个无系绳,且具有感知自身运动的柔性执行器仍是一个挑战。
针对上述问题,中国科学院宁波材料技术与工程研究所增材制造材料技术团队程昱川研究员和孙爱华研究员基于石墨烯、低沸点溶液微滴和硅橡胶,制备了一种集成变形驱动和传感特性于一体的光响应液-气相变弹性体(PRPTE)(如图1)。PRPTE具有优异的机械性能,在100℃时,低沸点发生液-气相变产生的轴向力可以高达自身重量的400倍,且稳定性良好。以该材料为主动层材料,团队采用4D打印技术制备了一系列柔性执行器,实现弯曲、抓取和爬行等光控程序化运动(如图3)。
尤其重要的是,基于电容变化PRPTE表现出自传感特性。石墨烯吸收近红外光产生热量,低沸点液体发生液-气相变,介电常数减小;石墨烯因硅橡胶膨胀而逐渐分散,弹性体介电常数减小;同时电极间距增大。在以上三个因素的共同作用下,PRPTE的电容会迅速减小,从而实现对其变形的实时感知。模仿生物体利用其自身信号反馈调节肌肉收缩和拉伸,从而进行复杂运动,团队制备了一种人工肌肉(如图2)。该人工肌肉可以通过反馈的电容值得知腿部弯曲角度,并根据需要的角度进行精确控制。该研究实现了柔性执行器的驱动/传感一体化功能集成,为设计和制造具有集成自感知能力的软机器人提供了新思路。
该工作以“4D printing Light-Driven soft actuators based on Liquid-Vapor phase transition composites with inherent sensing capability”为题发表在Chemical Engineering Journal, 2023, 454, 140271 (https://doi.org/10.1016/j.cej.2022.140271)。本研究得到了浙江省自然科学基金(No.LZ22E030003)、国家重点研发计划(No.2021YFB3701500)、国家自然科学基金(No.11874366)和宁波市重大科技攻关(No.20211ZDYF020228)等项目的支持。
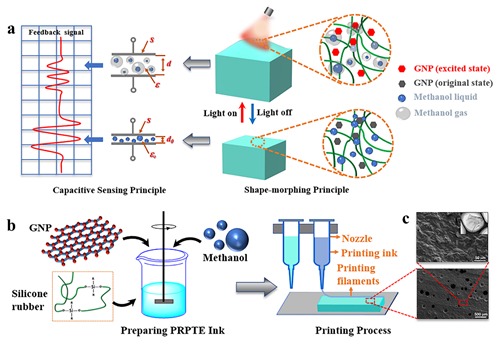
图1 PRPTE执行器的驱动、传感原理和制造
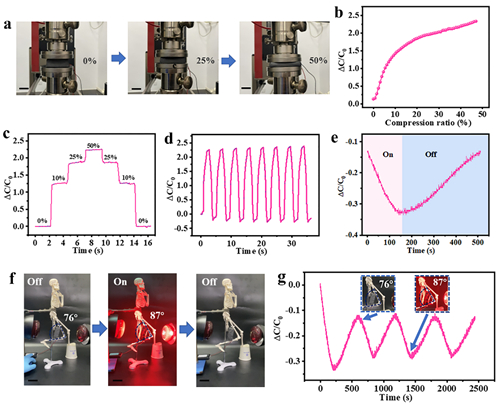
图2 PRPTE传感性能的表征
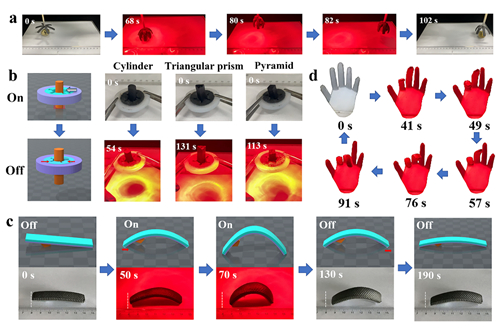
图3 4D打印PRPTE/PDMS双层结构执行器
中科院宁波材料所

|


