|
各种形状记忆、刺激响应性水凝胶一直以来都是推进软体机器人发展的关键所在。在过去的几十年间,基于对软性的生物组织,如肌腱和软骨机构上的灵感,各种可自主形变的水凝胶被研发出来用来作为软体机器人的执行部件。但是水凝胶的形变能力如形变程度的大小已经应变发生的速度受制于水凝胶机械强度。这意味着机械强度越高的水凝胶越是难以实现快速且形变量大的形变。尤其是一些可以发生刺激响应形变的水凝胶,具有剧烈体积变化但力学性能相对较弱。如何解决材料的形变能力与材料机械性能之间的矛盾一直以来是该领域的关键问题。
粘弹性是高分子材料和软生物组织的固有特性。硬水凝胶在力的装卸过程中存在很大的滞后性,这是由于硬水凝胶具有密集而强大的相互作用所形成的物理交联网络。在力卸载后,这些凝胶的恢复通常需要时间。硬水凝胶的回复速度可以通过超分子网络和环境条件进行调整。近期,浙江大学郑强、吴子良团队利用硬水凝胶释放弹性能量的时间依赖性,通过工程设计硬凝胶的粘弹性失配,实现程序化变形。通过具有不同时间变形的双层水凝胶的设计,使得材料主体一部份可以快速恢复,一部分慢速回复。这样,材料不需要改变环境条件就会经历了一个快速的形状改变过程,然后是一个缓慢的形状恢复过程,最终恢复其原始状态。这种机制使硬水凝胶通过不同的变形途径将粘弹性失配重新编程为不同的构型。该工作以题为“Engineering Viscoelastic Mismatch for Temporal Morphing of Tough Supramolecular Hydrogels”的文章,发表于Materials Horizons上。

双层水凝胶设计验证
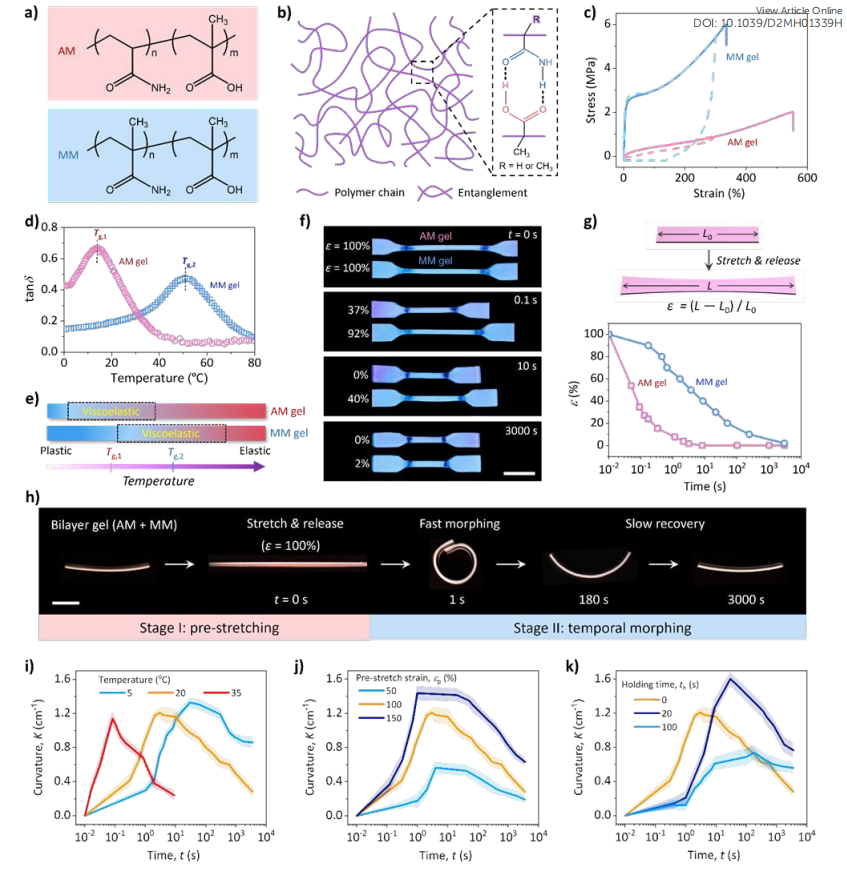
通过选择了两种具有明显粘弹性特性差异的坚韧的超分子凝胶来证明粘弹性-梯度诱导的时间变形的概念,即聚(丙烯酰胺-共-甲基丙烯酸)水凝胶(AM)和聚(甲基丙烯酰胺-共-丙烯酸)水凝胶(MM)。这些羧酸和酰胺基之间具有密集纠缠和氢键结合的凝胶具有优异的力学性能和显著的粘弹性,而 MM凝胶比AM凝胶具有相对较高的刚度和玻璃化转变温度。因此MM凝胶具有更长的时间响应性。当MM凝胶和AM凝胶结合时,两种凝胶的不同回收速度会导致预拉伸和释放后的应变错配和形状变形。从100%应变的预拉伸中释放后,双层凝胶在1s内迅速弯曲成弓形,然后逐渐恢复原来的扁平形状。这与大多数刺激响应材料的形状变化不同,粘弹性诱导的变形是自发的且具有时间性的,不需要任何的环境刺激。
双层水凝胶自发变形、回收及软体机器人应用验证
通过在双层凝胶中加入各种不同的图案来获得不同的瞬态构型。这主要是利用双层凝胶的结构不对称性也会导致应变的梯度分布,从而发生与期望的构型一致的变形。通过编程初始结构和/或应用多轴预拉伸,可以获得更复杂的构型。如图片案例钟凝胶在预拉伸后自发变形,迅速闭合形成盒子或花结构,然后慢慢打开形成原来的平面形。双层凝胶的时间变形和瞬态构型也可以通过空间调节硬凝胶的粘弹性来调节。如生理盐水处理被用来局部调整AM和MM凝胶的粘弹性特性。当在盐水溶液中平衡时,AM凝胶的杨氏模量(E)随盐度增加;AM凝胶在2M氯化钠溶液中杨氏模量是纯水的500倍,并且只有轻微收缩(每个方向的<为4%)。这是因为生理盐水降低了溶剂的质量,并增强了氢键的结合。两种凝胶的Tg均通过生理盐水处理得到提高,因此增强的氢键使凝胶处于当时的变形状态,表现出一定程度的塑性。
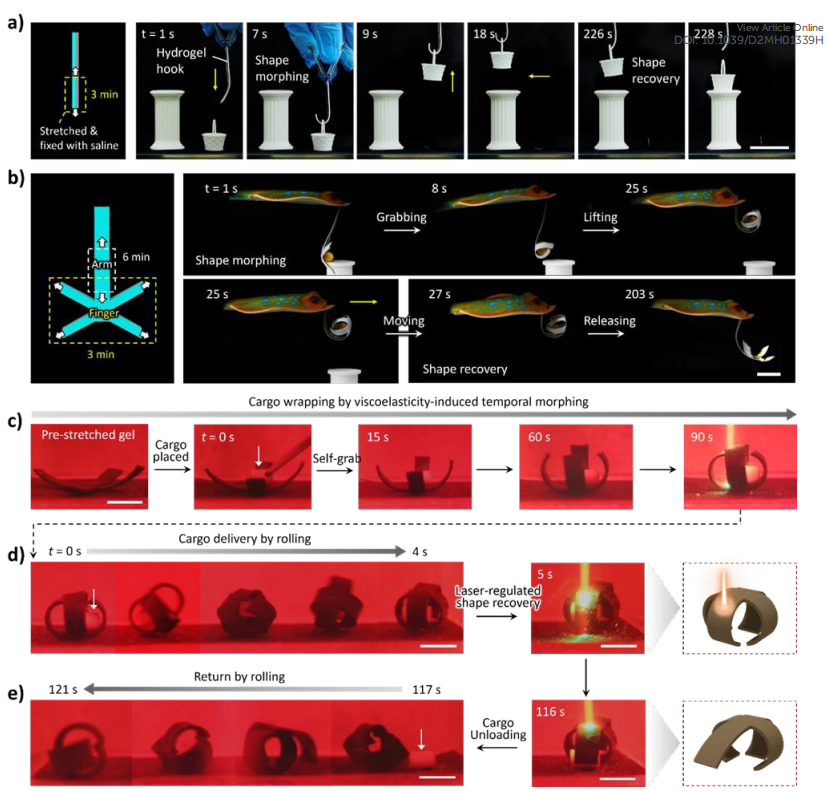
利用抗凝胶的粘弹性诱导时间变形可以设计具有自发形状变化和恢复独特特征的软体机器人执行器。如将部分双层凝胶条拉伸,然后在生理盐水中固化,以储存的弹性能固定的形状。当凝胶条被转移到水中时,它表现出快速弯曲和缓慢恢复的时间变形。凝胶带的这种行为可以作为一个自发的钩子来自我抓取和释放一个物体。通过控制生理盐水处理的持续时间,以调整不同部位的延迟变形,在凝胶条中实现了延迟变形的发生。将双层凝胶的四个“指”和一个“臂”拉伸至50%的应变,然后分别用2M氯化钠溶液处理3 min和6 min。处理过的凝胶被固定在一条玩具鱼上,作为一个自动的软夹具,“手指”卷曲抓住玻璃球,然后“手臂”弯曲举起球。当玩具鱼到达目的地后,由于凝胶的自我恢复,球会自发地从夹子中释放出来。
上面展示的水凝胶执行器的变形是自发的,但恢复需要数百到数千秒。为了解决这一限制,粘弹性凝胶的恢复动力学也可以通过其他刺激来调节。例如,四氧化三铁纳米颗粒(平均尺寸25 nm)作为光热剂加入到凝胶基质中,以调节纳米复合材料凝胶的粘弹性恢复速度。在520 nm激光照射下,凝胶的局部温度在1s内从20℃迅速上升到65℃,加速了恢复过程。同时四氧化三铁纳米粒子加入后,水凝胶还可以受到磁场驱动。激光调节配置和硬凝胶的磁驱动运动的结合,使多功能软机器人的设计成为可能。四臂双层凝胶可以通过预拉伸诱导的自发变形自包裹货物,并在磁场的驱动下将货物运送到目的地。货物的释放是通过激光触发回收变形凝胶的单臂来实现的。
小结:该文章通过工程上的设计使得材料整体发生粘弹性失配来实现坚韧水凝胶的暂时性的变形。这一策略解决了水凝胶材料的变形速度和力学韧性之间的权衡。硬凝胶的形状变形过程在恒定条件下是自发的,具有快速变形后缓慢恢复到原始状态的特点。这是第一次尝试利用粘弹性作为一种新的调节机制来实现硬水凝胶的程序化形状变形。这一策略将为无响应的粘弹性材料在软执行器、软机器人、生物医学设备和柔性电子设备的应用提供良好的前景。
高分子科学前沿

|